Indoor Localization
Multi-classificiation in indoor localization provides:
- Consideration of specific indoor environment and building constructions Every building has various indoor environment and building constructions. Even if two different locations are in same building, the environment and construction can be different. For example, the basement and hallway in same building.
- Trilateration with regression model cannot be the answer. In KSW building, RSSI from beacons that are installed at the ceilings and top of the wall didn't decrease exponentially.
- Model would estimate the cell(The building was separated into 31 cells) that user located. This may not estimate the exact location of user, however the accuracy would be improved and the accuracy is more important than the exact location.
- Place: KSW Building
- Device: iPhone12, Galaxy A30
- 22 Beacons were installed on the ceilings and at the top of the wall
- Devices were held by person.
- KSW building was divided into 31 cells
At first, experiment result was not good enough in real world test. After we collect the training and validation data, we rerun the application to collect the real test data in different date.
| Training | Validation | Test | |
|---|---|---|---|
| accuracy | 0.9152 | 0.8493 | 0.1874 |
| precision | 0.9270 | 0.8694 | 0.1263 |
| recall | 0.9031 | 0.8374 | 0.1263 |
| F1score | 0.9137 | 0.8478 | 0.1093 |
We made 2 hypothesis to figure out the failure.
- Beacon's advertising interval: 100ms
- iOS/Android receiving frequency: 1000ms - ⍺
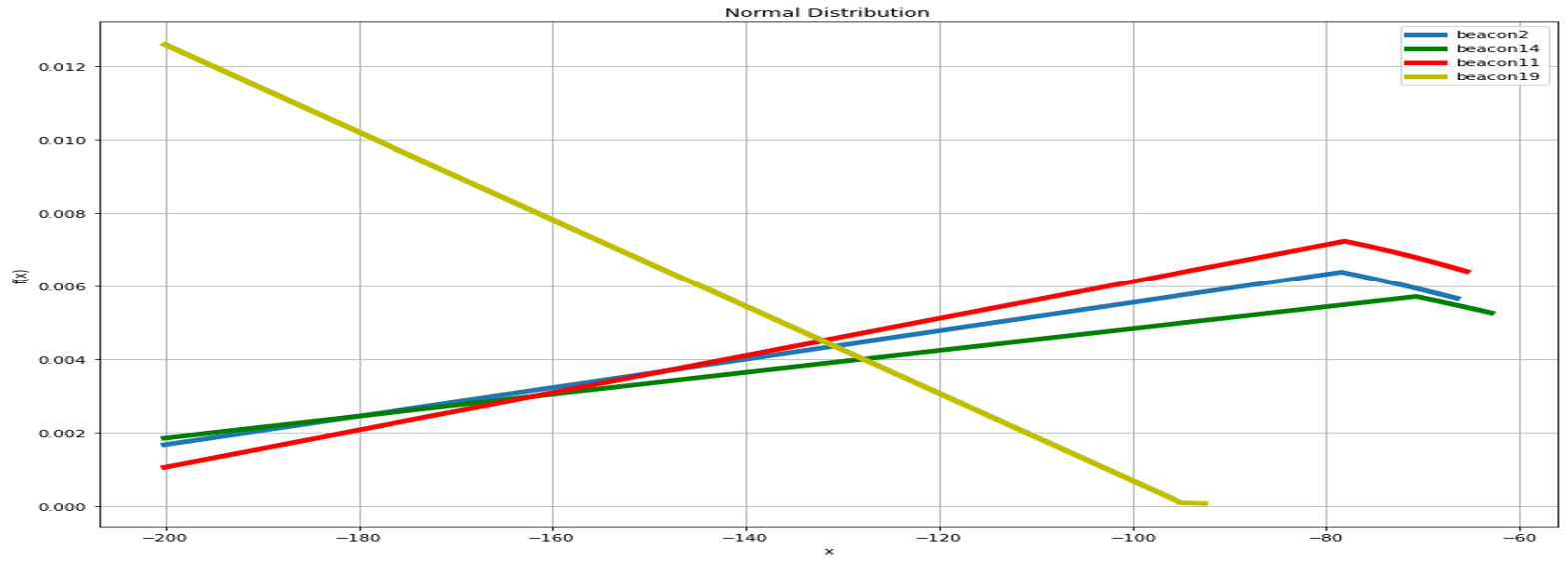
This means the packet loss between transmitters and receivers. We defined the packet loss as -200 dbm. The solution for the packet loss would be using median value of N-th beacon RSSI. Since the normal distribution for each beacon is biased, when beacon1's RSSI distribution is biased -200, this meant the beacon1 is far away from the device. On the other hand, if the beacon2's RSSI distribution is biased -60, this meant the beacon2 is near. And the packet loss would be change to the median value which is not -200.
We change the packet loss which is -200 to the median value for each columns.
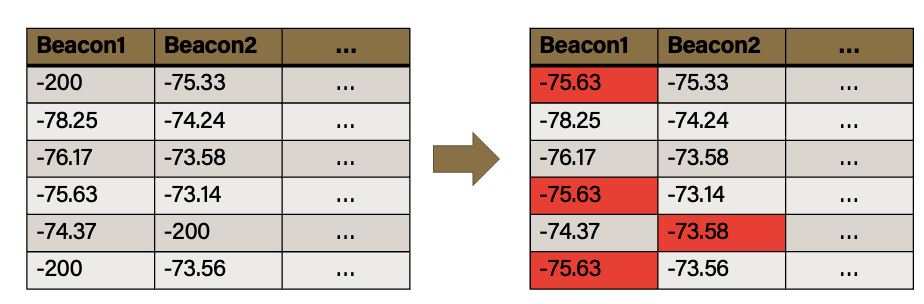
If we use whole 22 beacon RSSI as an input, the model would be confused. As the distance between beacon and device increases, the fluctuation pattern of RSSI is not comparable. Therefore, the need to find the optimal top N of beacons occurred. The solution for the hypothesis 2 is finding out the optimal top N beacons to use as a valid value. When we selected the optimal N, others will be -200 dbm as an invalid value. The table shows the dataset when the optimal N is 4.
| Beacon1 | Beacon2 | Beacon3 | Beacon4 | Beacon5 | Beacon6 | … | beacon19 | beacon20 | beacon22 |
|---|---|---|---|---|---|---|---|---|---|
| -75.63 | -75.33 | -68.95 | -200 | -200 | -200 | … | -200 | -200 | -56.95 |
| -78.25 | -74.24 | -69.60 | -200 | -200 | -200 | … | -200 | -200 | -54.14 |
| -76.17 | -73.58 | -69.18 | -200 | -200 | -200 | … | -200 | -200 | -56.95 |
| -75.63 | -73.14 | -68.95 | -200 | -200 | -200 | … | -200 | -200 | -58.27 |
| -74.37 | -73.58 | -68.76 | -200 | -200 | -200 | … | -200 | -200 | -59.56 |
| -75.63 | -73.56 | -68.95 | -200 | -200 | -200 | … | -200 | -200 | -57.11 |
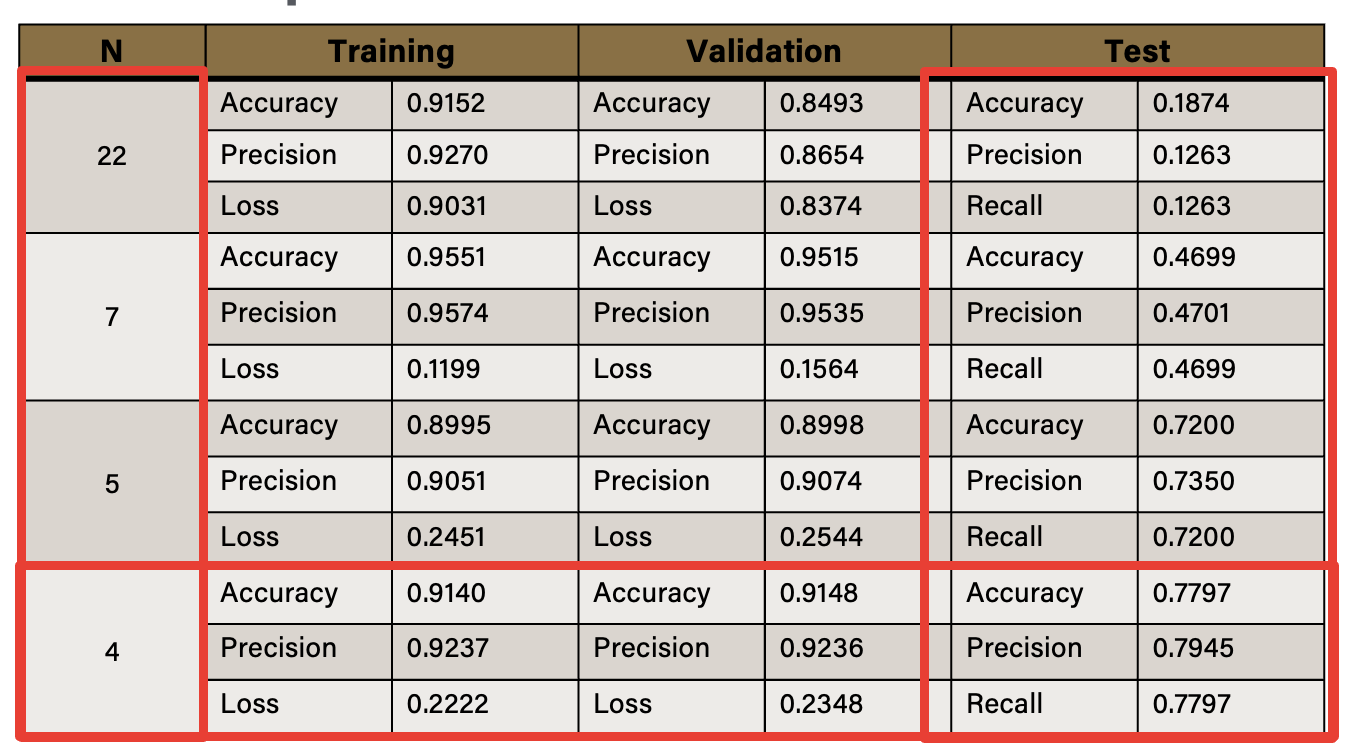
As you can see, 7, 4, 5, and 22 are in descending order of training and validation accuracy. However, the test accuracy of 4 beacons is the highest. So we select optimal N as 4.
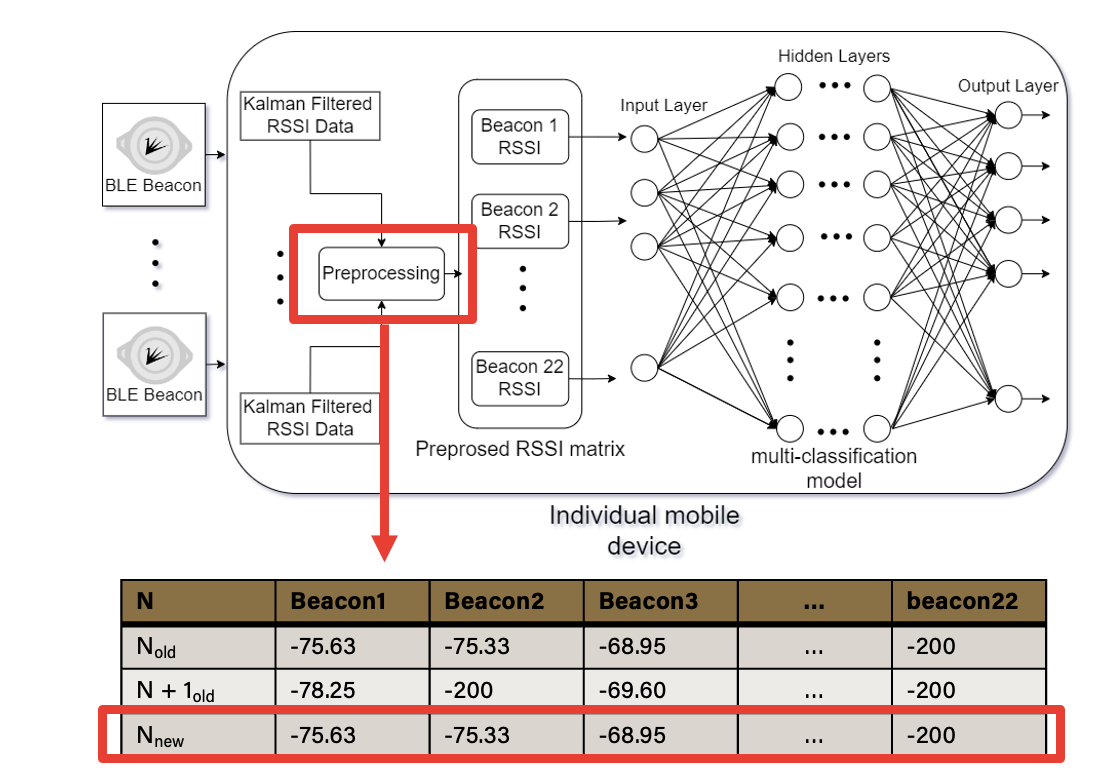
This picture is an overview of indoor localization. In mobile, the filtered data will be preprocessed. We try to reduce the loss of the packet. 2 continuous RSSI vectors will be combined into one by choosing the higher value. Then, the ported model will estimate the probabilities of the entire cells. We are going to use the max value among these.
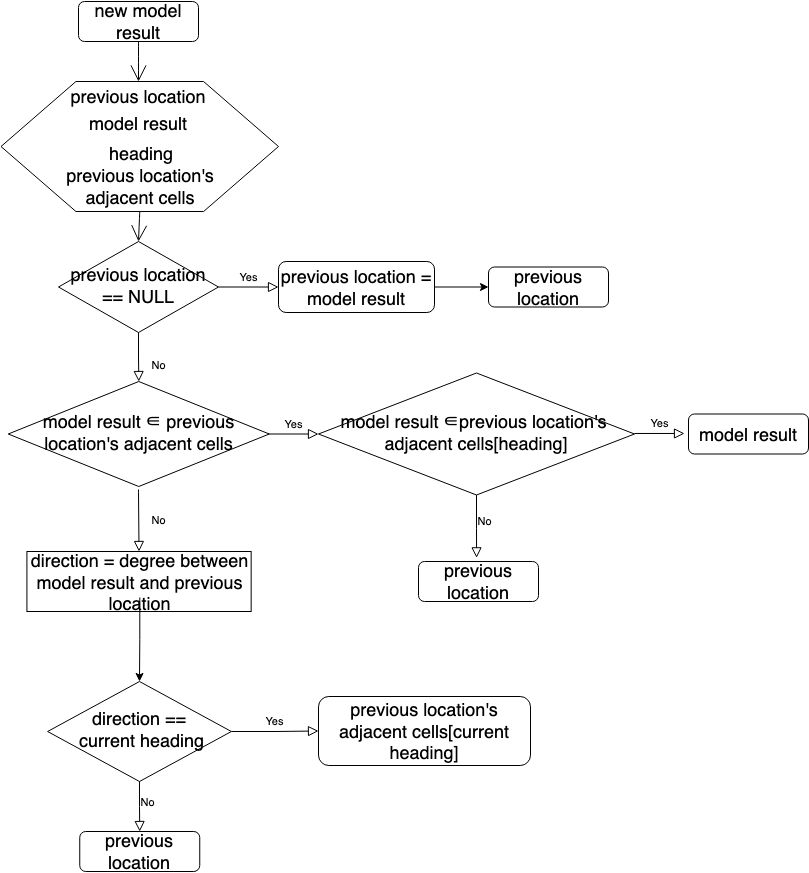
Since we had a hard time positioning the moving person, we fusioned the compass sensor and the result of the model. By comparing the compass sensor and model result, the accuracy of indoor localization for moving person improved. Also, based on the variation of RSSI value in a stationary status, the Kalman filter is re-initialized when a certain amount is over the threshold.