This repository was archived by the owner on Jun 13, 2023. It is now read-only.
Open
Conversation
…e, and propagate to gyro
This file contains hidden or bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
Sign up for free
to subscribe to this conversation on GitHub.
Already have an account?
Sign in.
1 participant
Add this suggestion to a batch that can be applied as a single commit.This suggestion is invalid because no changes were made to the code.Suggestions cannot be applied while the pull request is closed.Suggestions cannot be applied while viewing a subset of changes.Only one suggestion per line can be applied in a batch.Add this suggestion to a batch that can be applied as a single commit.Applying suggestions on deleted lines is not supported.You must change the existing code in this line in order to create a valid suggestion.Outdated suggestions cannot be applied.This suggestion has been applied or marked resolved.Suggestions cannot be applied from pending reviews.Suggestions cannot be applied on multi-line comments.Suggestions cannot be applied while the pull request is queued to merge.Suggestion cannot be applied right now. Please check back later.
Summary
Converts the attitude dynamics implementation to track angular momentum as the state, instead of angular velocity. Moves angular velocity to the derived state. Propagates all changes to existing unittests.
(Angular velocity is a bad state to track because it is coupled with the moment of inertia of the spacecraft, which changes significantly as fuel gets used up throughout the mission. Tracking angular momentum makes state propagation much easier, even if the initial conditions may be a bit confusing)
Testing
Existing unittests.
Running a sim with D_T=0.1 gives a reasonable output when looking at
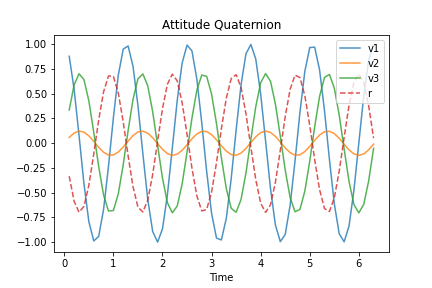
plot_quat():Nothing else 😅
Notes
This will make implementing the ACS actuator model significantly easier when we get around to it.
The math that's implemented here is based off of my MAE 4060 notes, which are at Team Docs > References > Spaceflight course handouts (MAE 4060)
Comments