code for "机器人高级实践",双轮足平衡小车,实现细节见.docx文件

-
小车硬件:hardware 文件夹
-
小车建模:solidworks_models 文件夹,小车轮腿图:
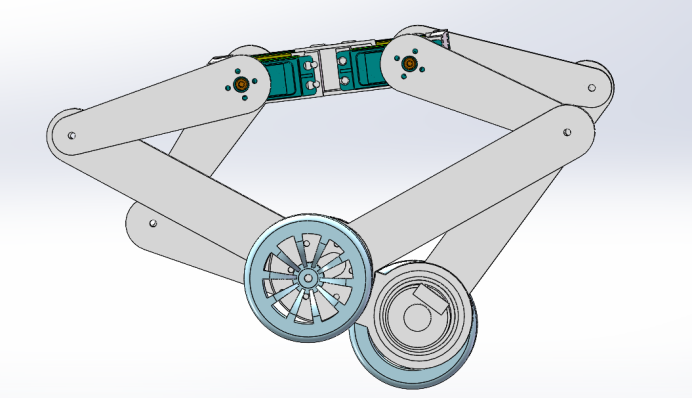
-
开发平台:STM32CubeMX 和 keil5 联合开发
-
小车运行工程:code-->MDK-ARM-->Encoder.uvprojx
-
功能:
- 平衡与抗干扰
default.mp4
- 轮腿伸缩
default.mp4
- 直立行走:可以使用手机蓝牙app(code文件夹里的base.apk.1)控制小车的前进、后退、左转、右转和停止